Description | Setup | Initial Results | Next Results | 12" Gyro Results | Next 12" Results
C1 Results | Next C1 | Final C1
1. Summary of Results
Expected results were obtained on channel two at 3000RPM but was not repeatable at 2000RPMs and the previous results were seen on channel one. It was found the platform has considerable wobble.
2. Introduction
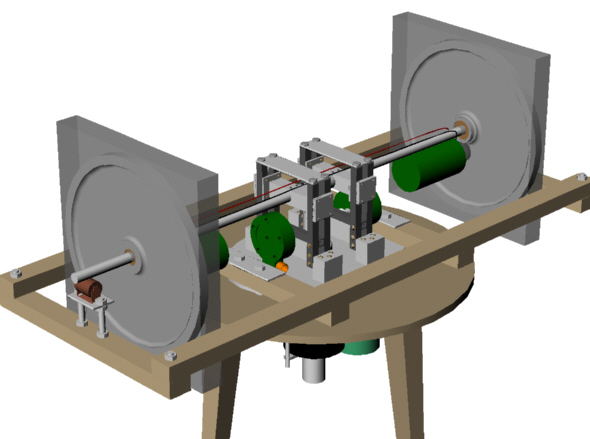
The C0 test apparatus was modified, now called C1, to include supports for the axle that are on the outside, as shown in figure one and two.
Figure 1: Rendered C1 (also shows wind shields and motors which were not done)
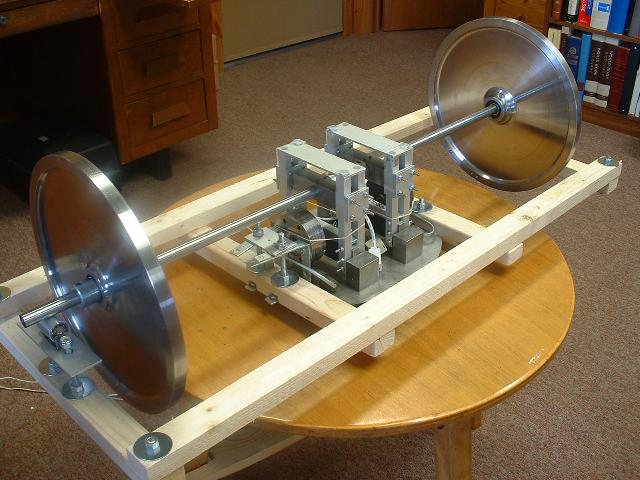
Figure 2: Shows the actual C1
See Initial Results for a description of the variable types.
3. Baseline Results
These results correspond to step 3 in the description and are run with the following static variables:
Note: This was chosen because when channel two measures that force, a 3000RPM gyro is off it's rest and can provide an easy baseline.
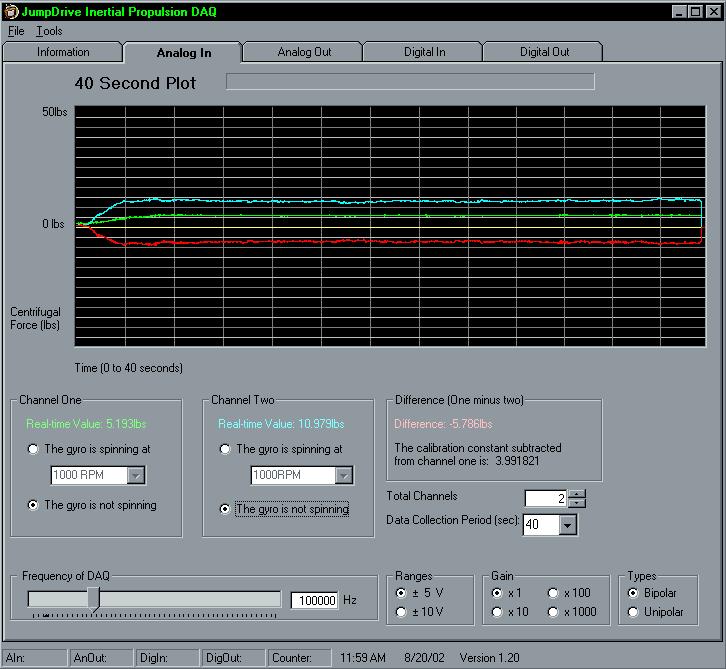
Raw Data: "C1 - B_10_0_00.txt" (Contained in "Baseline Raw Data.zip")
4. Primary Results
The primary results consist of altering one variable at a time and each time, two separate measurements are taken.
For all the primary results, the following static variables apply:
Gyro Variable, Channel One Gyro 3000RPM - G_1_0_00
Note: This channel contains the gyro which was balanced.
Raw Data Filename - "C1 - G_1_0_00.txt" (Contained in "Raw Data for Gyro Variable.zip")
Gyro Variable, Channel One Gyro 2000RPM - G_1_0_01
Note: This channel contains the gyro which was balanced.
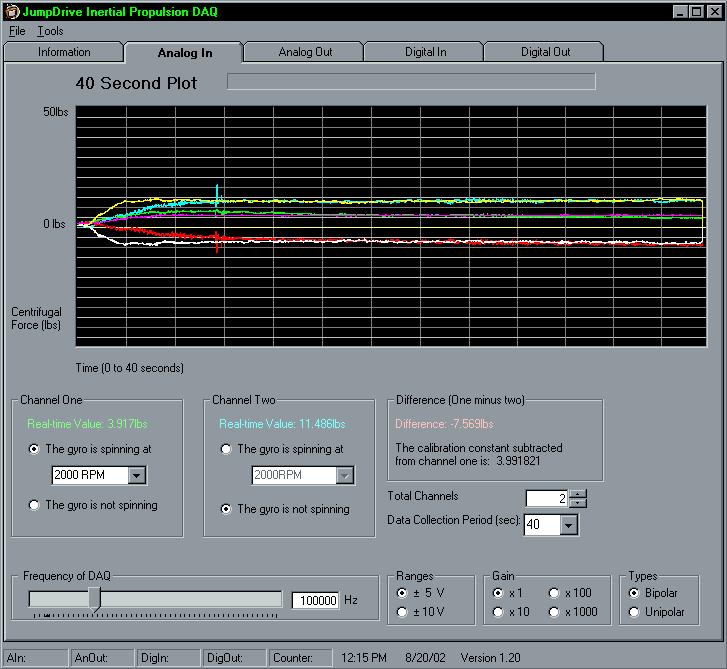
Raw Data: "C1 - G_1_0_01.txt" (Contained in "Raw Data for Gyro Variable.zip")
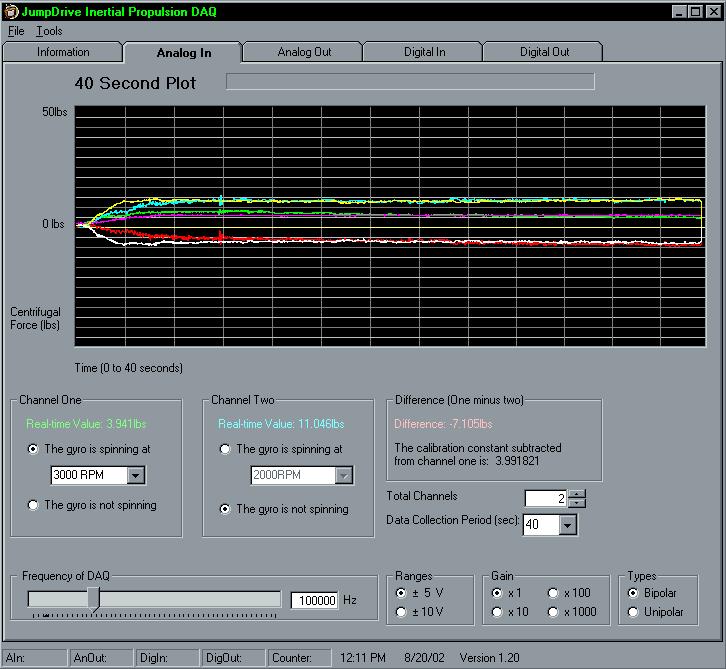
Gyro Variable, Channel Two Gyro 3000RPM - G_2_0_00
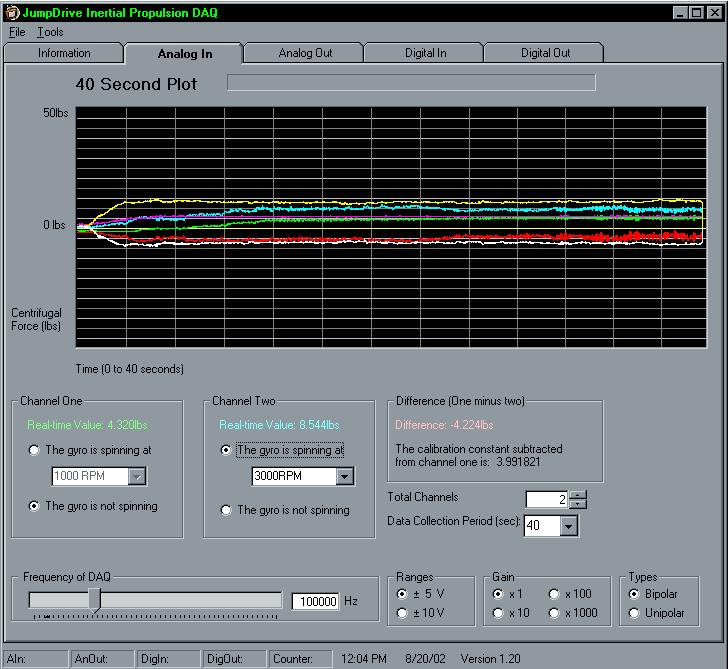
Raw Data: "C1 - G_2_0_00.txt" (Contained in "Raw Data for Gyro Variable.zip")
Gyro Variable, Channel Two Gyro 2000RPM - G_2_0_01
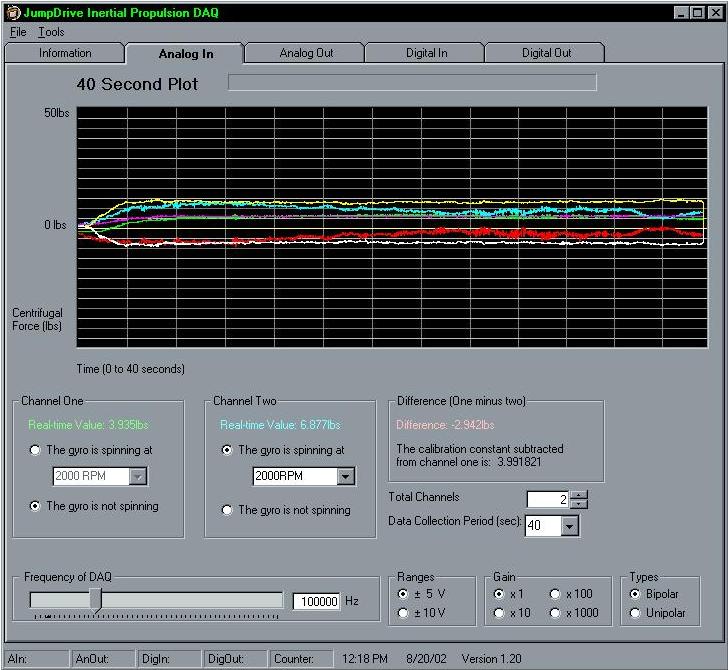
Raw Data: "C1 - G_2_0_01.txt" (Contained in "Raw Data for Gyro Variable.zip")
5. Analysis
G_2_0_00 clearly shows that when the second channel (blue line) is compared to the baseline (yellow) there is a difference even while the first channel (green) is showing the same force as the baseline (purple).
However there are still problems, take G_2_0_01 for example, it shows that compared to the Sensotec load cell, the lebow load cell can take significant force difference before measuring the difference (hysteresis), especially at forces around 2 to 5 lbs. It is believed that bad hysteresis is the cause of inverse results.
Description | Setup | Initial Results | Next Results | 12" Gyro Results | Next 12" Results
C1 Results | Next C1 | Final C1
JumpDrive Confidential, 2002 - All right reserved, no part of this document may be reproduced without the authors permission.